


2.1K
In this example we look at the MMA7660FC accelerometer connected to a Raspberry pi
The MMA7660FC is a digital output I²C, very low-power, low-profile capacitive micro-machined accelerometer featuring a low pass filter, compensation for zero-g offset and gain errors and conversion to six-bit digital values at a user configurable output data rate. The device can be used for sensor data changes, product orientation and gesture detection through an interrupt pin (INT).
Features
# Distributed with a free-will license.
# Use it any way you want, profit or free, provided it fits in the licenses of its associated works.
# MMA7660FC
# This code is designed to work with the MMA7660FC_I2CS I2C Mini Module available from ControlEverything.com.
# https://www.controleverything.com/content/Accelorometer?sku=MMA7660FC_I2CS#tabs-0-product_tabset-2
import smbus
import time
# Get I2C bus
bus = smbus.SMBus(1)
# I2C address of the device
MMA7660FC_DEFAULT_ADDRESS = 0x4C
# MMA7660FC Register Map
MMA7660FC_XOUT = 0x00 # Output Value X
MMA7660FC_YOUT = 0x01 # Output Value Y
MMA7660FC_ZOUT = 0x02 # Output Value Z
MMA7660FC_TILT = 0x03 # Tilt Status
MMA7660FC_SRST = 0x04 # Sampling Rate Status
MMA7660FC_SPCNT = 0x05 # Sleep Count
MMA7660FC_INTSU = 0x06 # Interrupt Status
MMA7660FC_MODE = 0x07 # Mode Register
MMA7660FC_SR = 0x08 # Sample Rate Register
MMA7660FC_PDET = 0x09 # Tap/Pulse Detection Register
MMA7660FC_PD = 0x0A # Tap/Pulse Debounce Count Register
# MMA7660FC Mode Register
MMA7660FC_MODE_STANDBY = 0x00 # Standby Mode
MMA7660FC_MODE_TEST = 0x04 # Test Mode
MMA7660FC_MODE_ACTIVE = 0x01 # Active Mode
MMA7660FC_AWE_EN = 0x08 # Auto-Wake Enabled
MMA7660FC_AWE_DS = 0x00 # Auto-Wake Disabled
MMA7660FC_ASE_EN = 0x10 # Auto-Sleep Enabled
MMA7660FC_ASE_DS = 0x00 # Auto-Sleep Disabled
MMA7660FC_SCPS_16 = 0x20 # Prescaler is divide by 16
MMA7660FC_SCPS_1 = 0x00 # Prescaler is divide by 1
MMA7660FC_IPP_OPEN = 0x00 # Interrupt output INT is open-drain
MMA7660FC_IPP_PUSH = 0x40 # Interrupt output INT is push-pull
MMA7660FC_IAH_LOW = 0x00 # Interrupt output INT is active low
MMA7660FC_IAH_HIGH = 0x80 # Interrupt output INT is active high
# MMA7660FC Sample Rate Register
MMA7660FC_AMSR_120 = 0x00 # 120 Samples/Second Active and Auto-Sleep Mode
MMA7660FC_AMSR_64 = 0x01 # 64 Samples/Second Active and Auto-Sleep Mode
MMA7660FC_AMSR_32 = 0x02 # 32 Samples/Second Active and Auto-Sleep Mode
MMA7660FC_AMSR_16 = 0x03 # 16 Samples/Second Active and Auto-Sleep Mode
MMA7660FC_AMSR_8 = 0x04 # 8 Samples/Second Active and Auto-Sleep Mode
MMA7660FC_AMSR_4 = 0x05 # 4 Samples/Second Active and Auto-Sleep Mode
MMA7660FC_AMSR_2 = 0x06 # 2 Samples/Second Active and Auto-Sleep Mode
MMA7660FC_AMSR_1 = 0x07 # 1 Samples/Second Active and Auto-Sleep Mode
MMA7660FC_AWSR_32 = 0x00 # 32 Samples/Second Auto-Wake Mode
MMA7660FC_AWSR_16 = 0x08 # 16 Samples/Second Auto-Wake Mode
MMA7660FC_AWSR_8 = 0x10 # 8 Samples/Second Auto-Wake Mode
MMA7660FC_AWSR_1 = 0x18 # 1 Samples/Second Auto-Wake Mode
class MMA7660FC():
def __init__(self):
self.mode_config()
self.sample_rate_config()
def mode_config(self):
"""Select the mode control register of the accelerometer from the given provided values"""
MODE_CONTROL = (MMA7660FC_MODE_ACTIVE | MMA7660FC_AWE_DS | MMA7660FC_ASE_DS | MMA7660FC_SCPS_1 | MMA7660FC_IAH_LOW)
bus.write_byte_data(MMA7660FC_DEFAULT_ADDRESS, MMA7660FC_MODE, MODE_CONTROL)
def sample_rate_config(self):
"""Select the sample rate register of the accelerometer from the given provided values"""
SAMPLE_RATE = (MMA7660FC_AMSR_2)
bus.write_byte_data(MMA7660FC_DEFAULT_ADDRESS, MMA7660FC_SR, SAMPLE_RATE)
def read_accl(self):
"""Read data back from MMA7660FC_XOUT(0x00), 3 bytes
X-Axis Accl, Y-Axis Accl, Z-Axis Accl"""
data = bus.read_i2c_block_data(MMA7660FC_DEFAULT_ADDRESS, MMA7660FC_XOUT, 3)
# Convert the data to 6-bits
xAccl = data[0] & 0x3F
if xAccl > 31 :
xAccl -= 64
yAccl = data[1] & 0x3F
if yAccl > 31 :
yAccl -= 64
zAccl = data[2] & 0x3F
if zAccl > 31 :
zAccl -= 64
return {'x' : xAccl, 'y' : yAccl, 'z' : zAccl}
from MMA7660FC import MMA7660FC
mma7660fc = MMA7660FC()
while True :
mma7660fc.mode_config()
mma7660fc.sample_rate_config()
time.sleep(0.1)
accl = mma7660fc.read_accl()
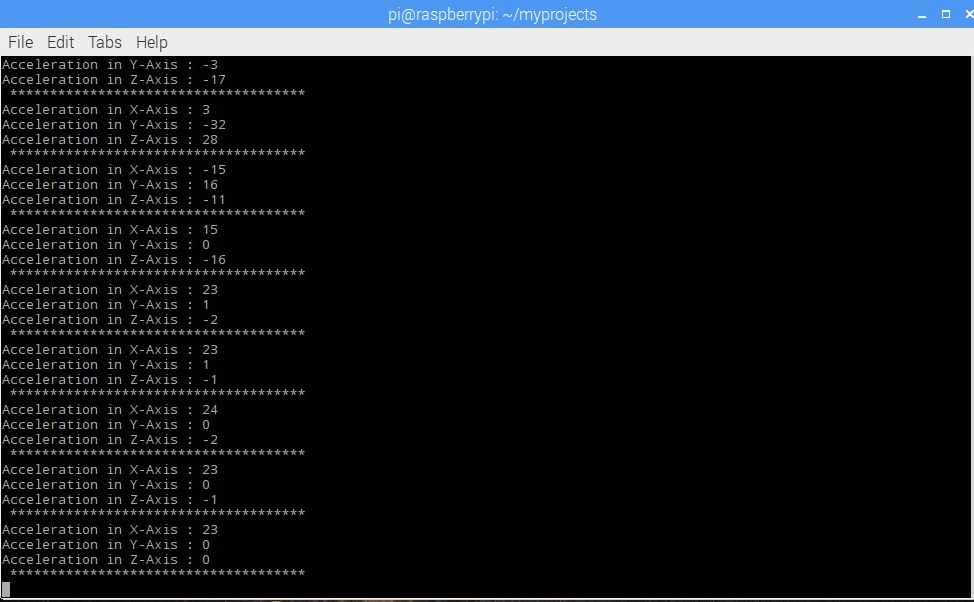
print "Acceleration in X-Axis : %d"%(accl['x'])
print "Acceleration in Y-Axis : %d"%(accl['y'])
print "Acceleration in Z-Axis : %d"%(accl['z'])
print " ************************************* "
time.sleep(1)
Output
run this by typing in
sudo python MMA7660FC.py
MMA7660 output
Link
https://www.nxp.com/docs/en/data-sheet/MMA7660FC.pdf