


In this article we look at a temperature sensor – this time its the TMP006 and we will connect it to our Raspberry Pi and show how to get readings from it in python
This is the sensor that I will be using
Lets look at some information regarding the sensor
Texas Instruments’ TMP006 is the first in a series of temperature sensors that measure the temperature of an object without the need to make contact with the object.
This sensor uses a thermopile to absorb the infrared energy emitted from the object being measured and uses the corresponding change in thermopile voltage to determine the object temperature.
Infrared sensor voltage range is specified from -40°C to +125°C to enable use in a wide range of applications. Low power consumption along with low operating voltage makes the part suitable for battery-powered applications.
The low package height of the chip-scale format enables standard high volume assembly methods, and can be useful where limited spacing to the object being measured is available.
Features
Complete single-chip digital solution, including integrated MEMS thermopile sensor, signal conditioning, ADC and local temperature reference
Digital output:
Sensor voltage: 7 µV/°C
Local temperature: -40°C to +125°C
SMBus™ compatible interface
Pin-programmable interface addressing
Low supply current: 240 µA
Low minimum supply voltage: 2.2 V
Parts Required
Schematic/Connection
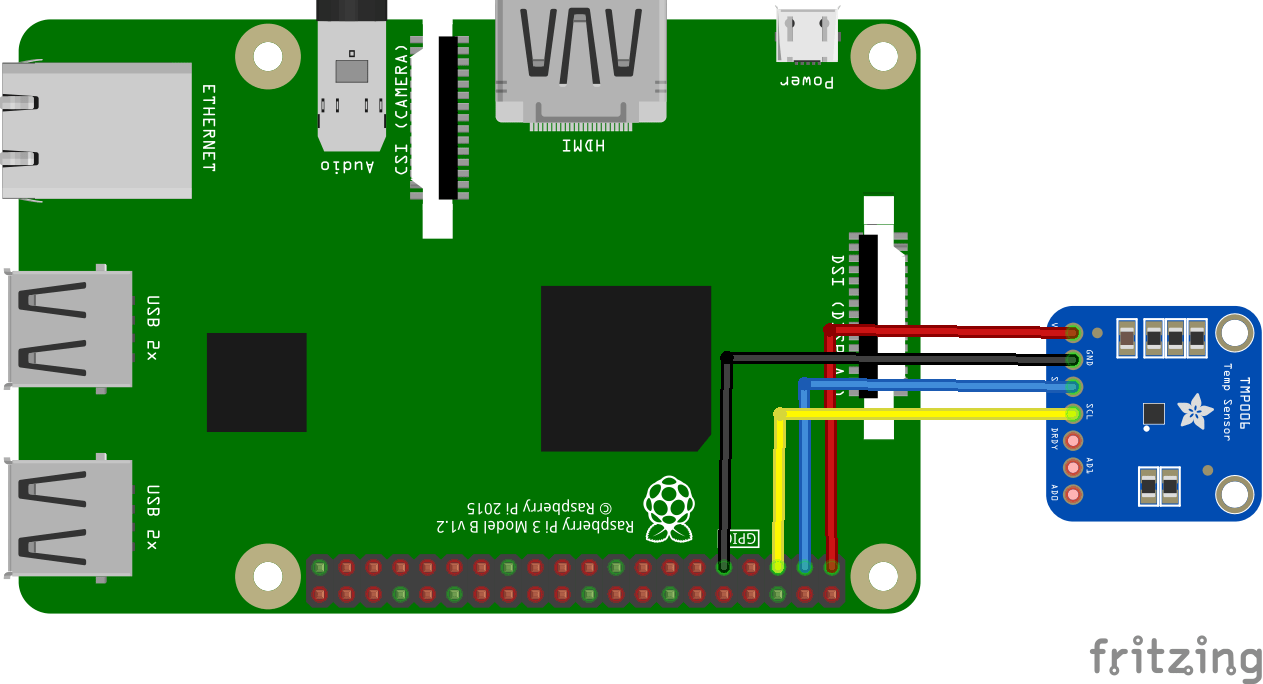
pi and tmp006
Code Example
This uses a library from Adafruit which you can install like this from the terminal
sudo pip3 install adafruit-circuitpython-tmp006
I then opened the Mu editor and entered the following code example, which is the same as the default example
[codesyntax lang=”python”]
import time
import board
import busio
import adafruit_tmp006
# Define a function to convert celsius to fahrenheit.
def c_to_f(c):
return c * 9.0 / 5.0 + 32.0
# Create library object using our Bus I2C port
i2c = busio.I2C(board.SCL, board.SDA)
sensor = adafruit_tmp006.TMP006(i2c)
# Initialize communication with the sensor, using the default 16 samples per conversion.
# This is the best accuracy but a little slower at reacting to changes.
# The first sample will be meaningless
while True:
obj_temp = sensor.temperature
print(
"Object temperature: {0:0.3F}*C / {1:0.3F}*F".format(obj_temp, c_to_f(obj_temp))
)
time.sleep(5.0)
[/codesyntax]
Output
Run this example and you should see the following
Object temperature: 27.956*C / 82.322*F
Object temperature: 29.212*C / 84.582*F
Object temperature: 30.822*C / 87.479*F
Object temperature: 27.267*C / 81.081*F
Object temperature: 17.911*C / 64.240*F
You can see the difference in the object temperature readings when it was pointing at my hand
Links